Pathfinding Algorithms
CS 351: Analysis of Algorithms
Abstract
This lecture reviews the three pathfinding algorithms we’ll use in Project 2: Greedy Best-First Search, Dijkstra’s Algorithm, and A*.
Introduction
What Are Pathfinding Algorithms?
Pathfinding algorithms find the optimal or near-optimal route between two points in a graph.
Applications:
- GPS navigation and route planning
- Video game AI and character movement
- Network routing protocols
- Robotics path planning
- Logistics and delivery optimization
Why Multiple Algorithms?
Different algorithms make different trade-offs:
- Speed vs. Optimality - Fast approximation vs. guaranteed shortest path
- Memory usage - How much information needs to be stored
- Use of heuristics - Leveraging domain knowledge for efficiency
Today we’ll review the three fundamental approaches to pathfinding on the same problem.
The Problem Setup
Our Example Graph
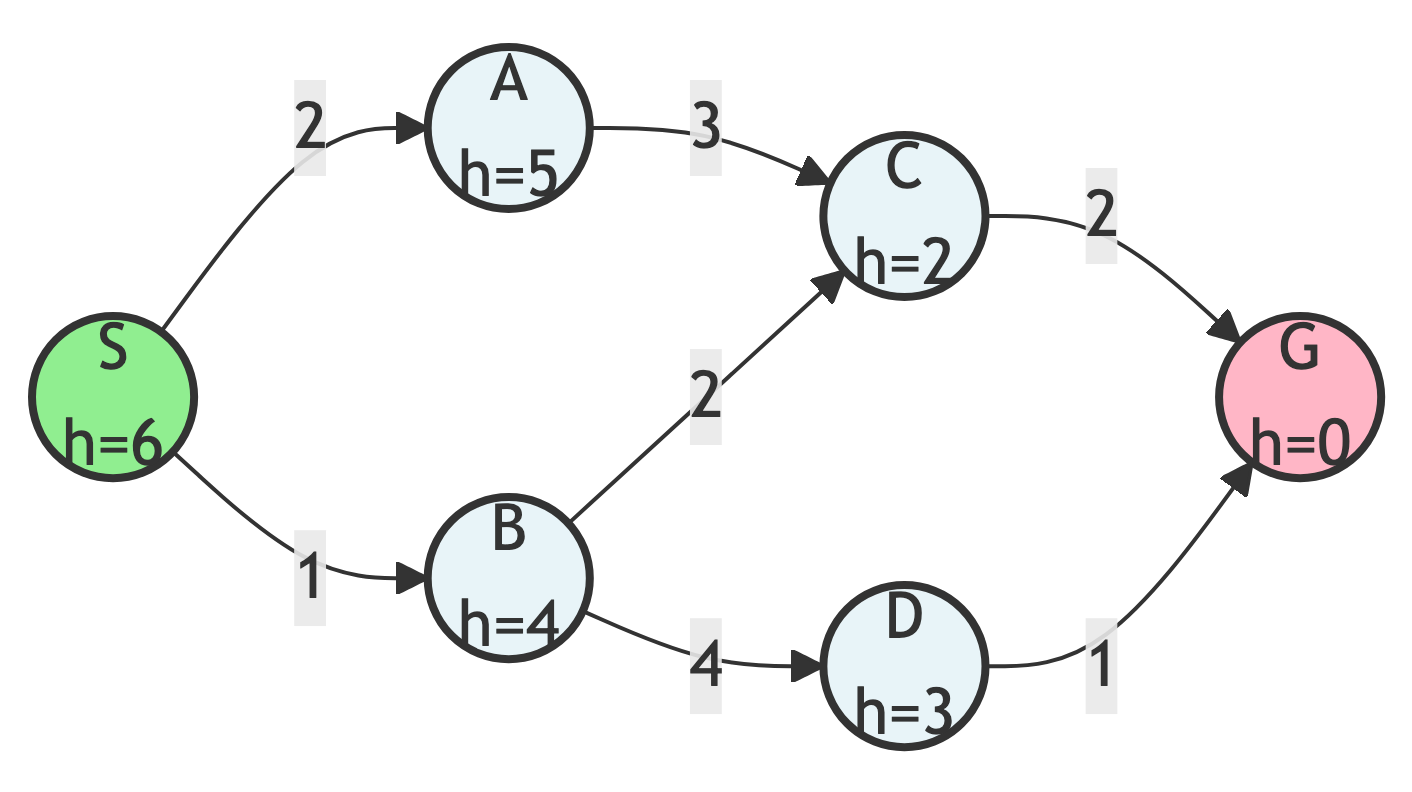
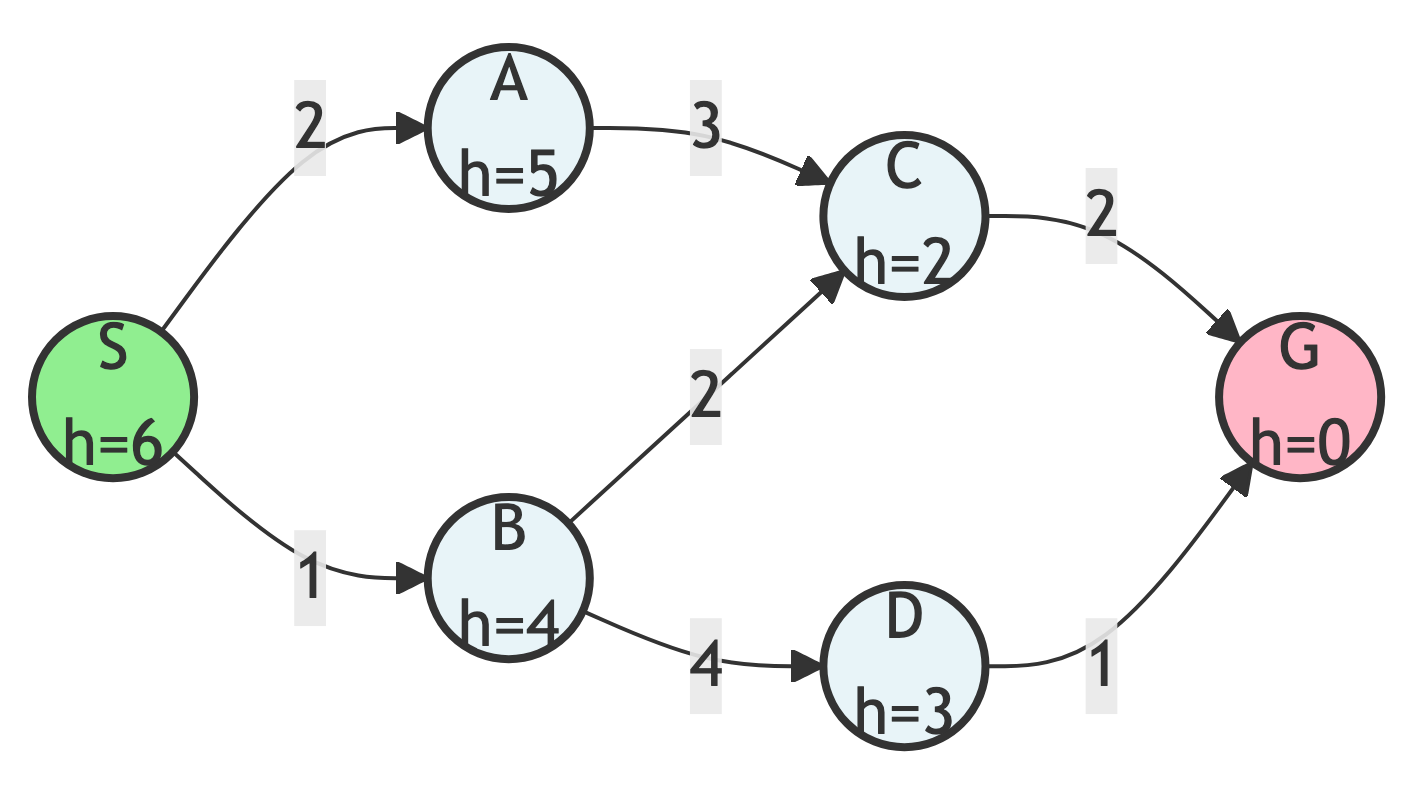
We’ll use a simple graph with 6 nodes to illustrate each algorithm:
Goal: Find a path from S (start) to G (goal)
Graph Components
Nodes:
- S (Start) - our starting point
- A, B, C, D - intermediate nodes
- G (Goal) - our destination
Edge Costs:
- The numbers on edges represent the actual cost to traverse the edge
Heuristic Values h(n):
- Estimated distance from each node to goal (shown below node names)
- This is a heuristic, an estimate of the remaining distance to the goal
Graph Data Table
| Edge | Cost | Node | h(n) |
|---|---|---|---|
| S → A | 2 | S | 6 |
| S → B | 1 | A | 5 |
| A → C | 3 | B | 4 |
| B → C | 2 | C | 2 |
| B → D | 4 | D | 3 |
| C → G | 2 | G | 0 |
| D → G | 1 |
Note: The heuristic h(n) represents an estimate of the remaining distance to the goal.
Greedy Best-First Search
Algorithm Overview
Strategy:
- Always expand the node that appears closest to the goal based on the heuristic function h(n).
Key Characteristics:
- Uses only the heuristic h(n), ignoring actual path cost
- Greedy approach - makes locally optimal choices
- Fast but not guaranteed to find the optimal path
- Can be misled by poor heuristics
Greedy BFS: The Idea
Think of it like:
- Following the “scent” directly toward the goal, always choosing the path that seems to lead most directly there.
Analogy:
- Like a person lost in a forest who always walks in the direction that feels closest to home, without considering how difficult the terrain might be.
Greedy BFS Pseudocode
function GreedyBestFirstSearch(start, goal):
frontier = PriorityQueue()
frontier.add(start, h(start))
explored = empty set
while frontier is not empty:
current = frontier.pop() # Lowest h(n)
if current == goal:
return path
explored.add(current)
for each neighbor of current:
if neighbor not in explored:
frontier.add(neighbor, h(neighbor))
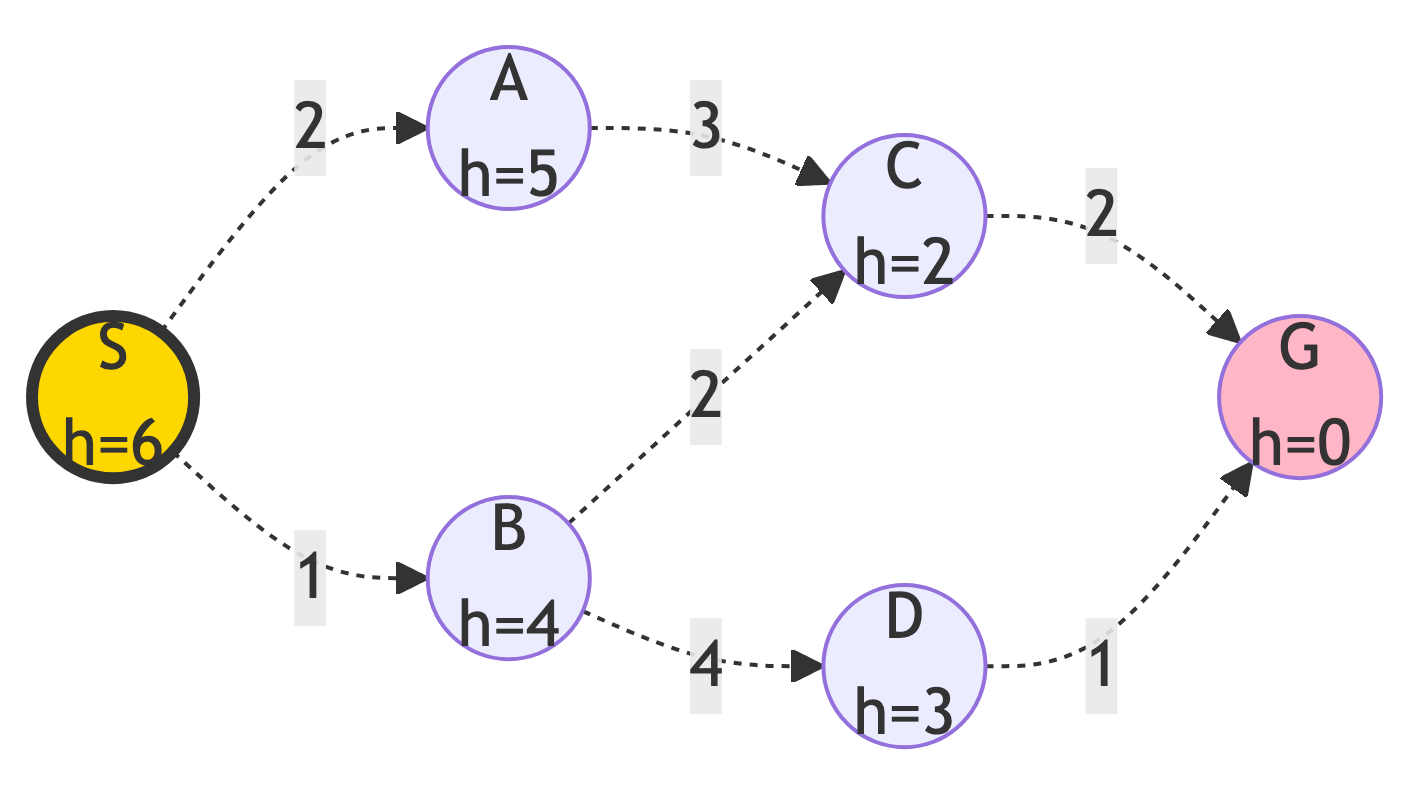
return failureStep 0: Initialize
Starting State:
- Frontier: {S (h=6)}
- Explored: {}
- Current path: None
Current node: S (highlighted in gold)
Step 1: Expand S
Action:
- Explore neighbors of S
Updates:
- Frontier: {B (h=4), A (h=5)}
- Explored: {S}
- B has lower h-value, so it will be expanded next
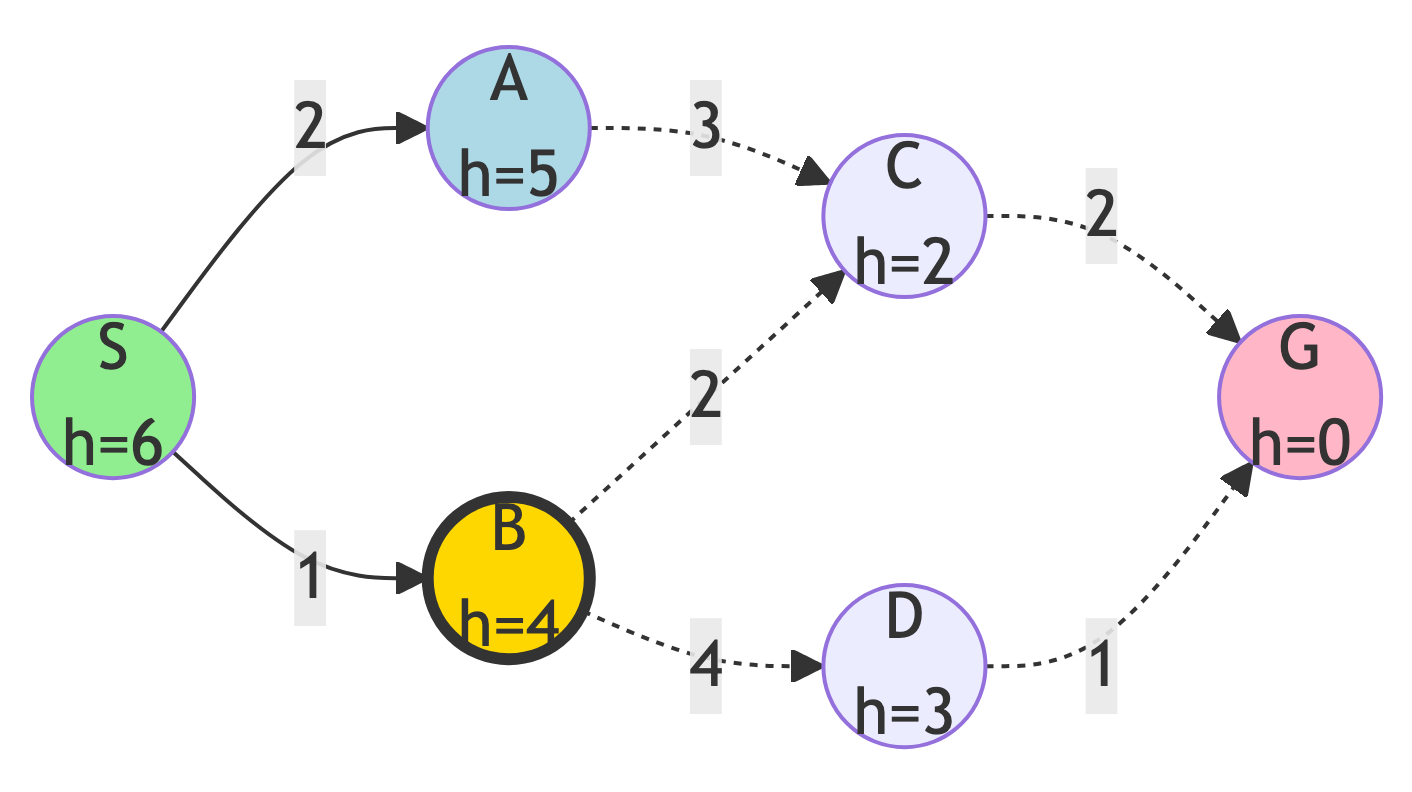
Step 2: Expand B
Action:
- B has the lowest heuristic (h=4)
Updates:
- Frontier: {C (h=2), D (h=3), A (h=5)}
- Explored: {S, B}
- C has the lowest h-value
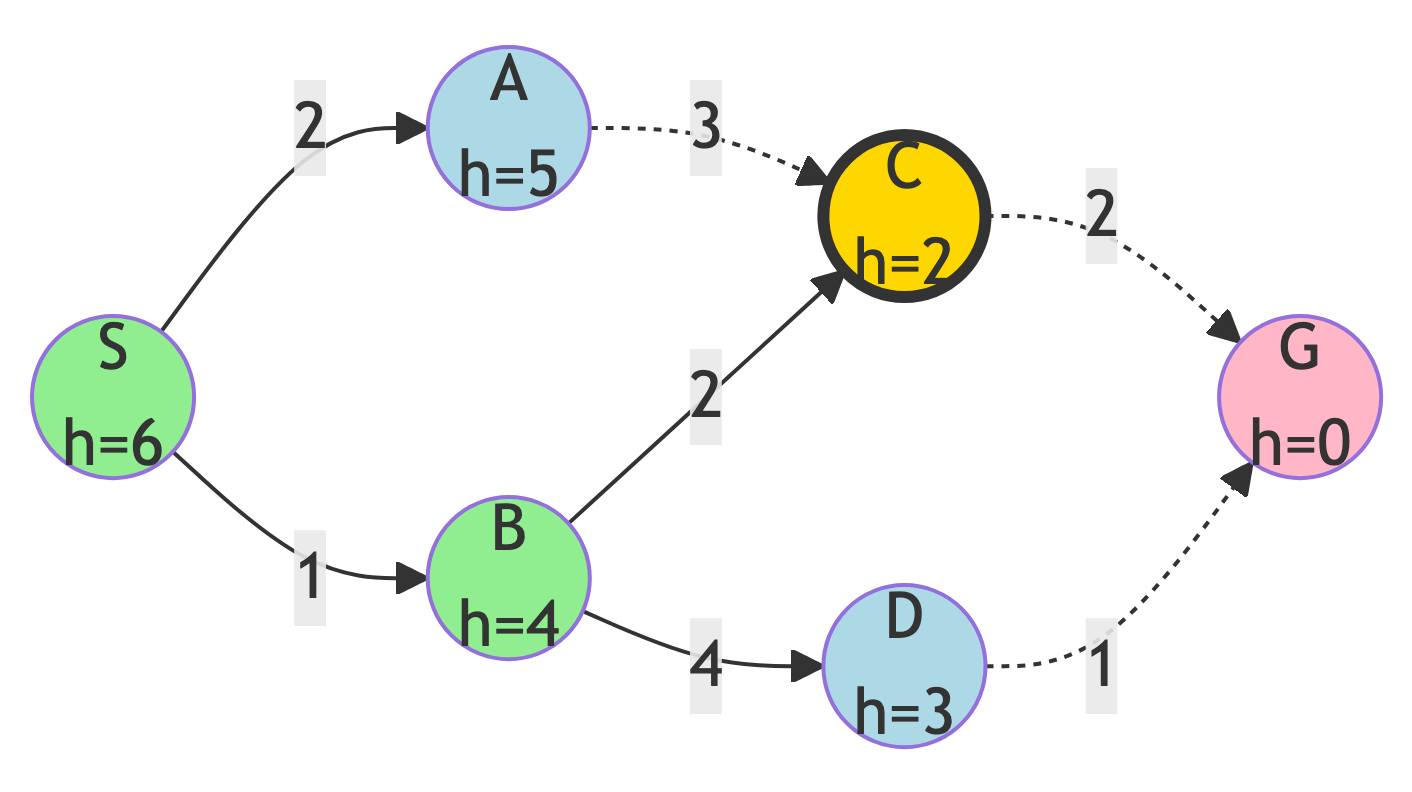
Step 3: Expand C
Action:
C has the lowest heuristic (h=2)
Updates:
- Frontier: {G (h=0), D (h=3), A (h=5)}
- Explored: {S, B, C}
- G is now in frontier!
Step 4: Reach Goal
Result:
- G has h=0 (lowest possible), expand it and find the goal!
Path Found:
- S → B → C → G
Path Cost:
- 1 + 2 + 2 = 5
Greedy BFS Results
Summary:
- Path: S → B → C → G
- Cost: 5
- Nodes Explored: 4 (S, B, C, G)
- Optimal? We’ll see…
Observation:
- The algorithm followed the heuristic values greedily, always choosing the node that seemed closest to the goal.
Dijkstra’s Algorithm
Algorithm Overview
Strategy:
- Expand nodes in order of their actual distance g(n) from the start, guaranteeing the shortest path.
Key Characteristics:
- Uses actual path cost g(n), ignoring heuristics
- Guarantees optimal solution
- More thorough exploration than Greedy BFS
- Uniform cost search variant
Dijkstra’s Algorithm: The Idea
Think of it like:
- Exploring all paths systematically by distance, like ripples expanding in water.
Analogy:
- Like carefully measuring every possible route with a measuring tape, always extending the shortest path found so far.
Dijkstra Pseudocode
function Dijkstra(start, goal):
frontier = PriorityQueue()
frontier.add(start, 0)
g_scores = {start: 0}
explored = empty set
while frontier is not empty:
current = frontier.pop() # Lowest g(n)
if current == goal:
return path
explored.add(current)
for each neighbor of current with cost:
tentative_g = g[current] + cost
if neighbor not in explored or
tentative_g < g[neighbor]:
g[neighbor] = tentative_g
frontier.add(neighbor, tentative_g)
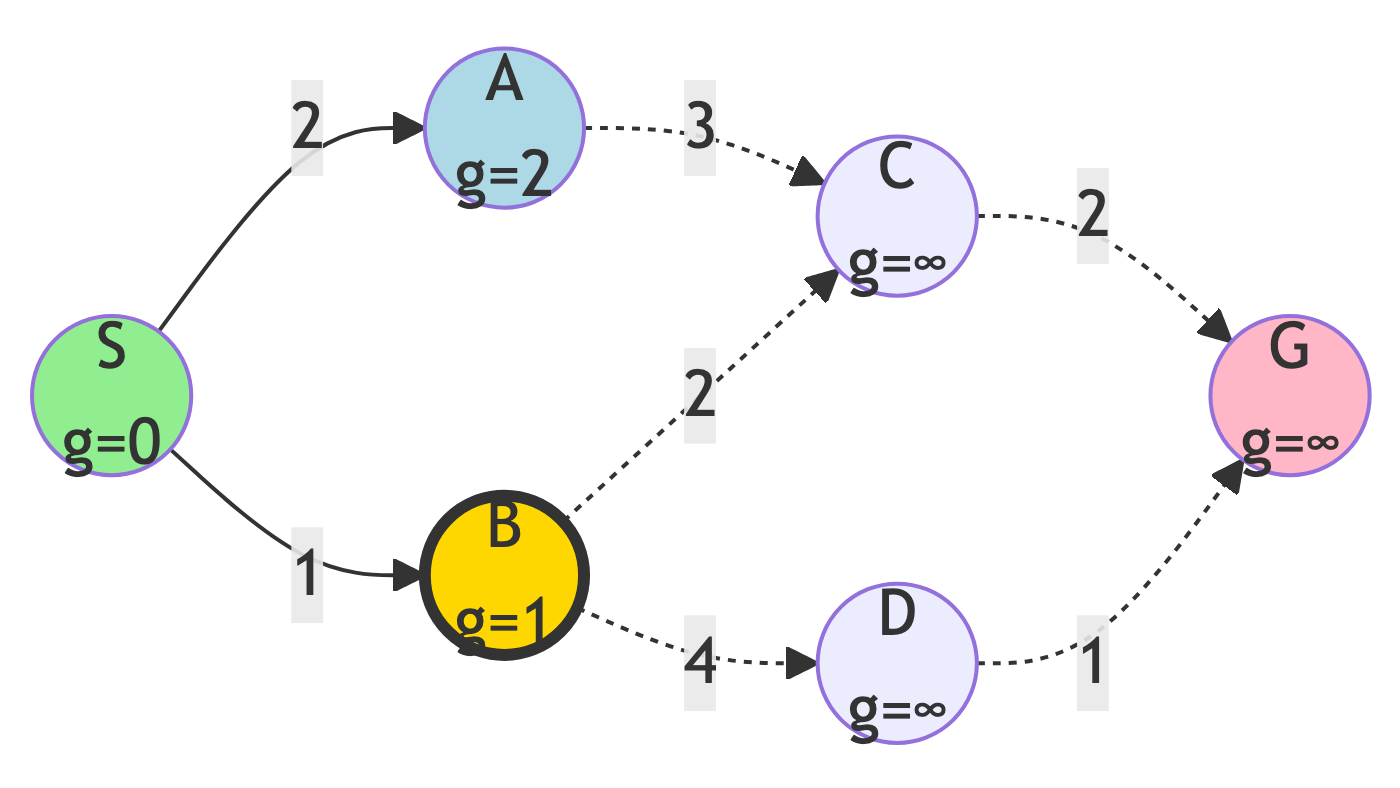
return failureStep 0: Initialize
Starting State:
- Frontier: {S (g=0)}
- g-scores: {S: 0}
- Explored: {}
All nodes start with g=∞ except start
Step 1: Expand S
Action:
- Explore S and update neighbors
g-score Updates:
- g(A) = 0 + 2 = 2
- g(B) = 0 + 1 = 1
New State:
- Frontier: {B (g=1), A (g=2)}
- Explored: {S}
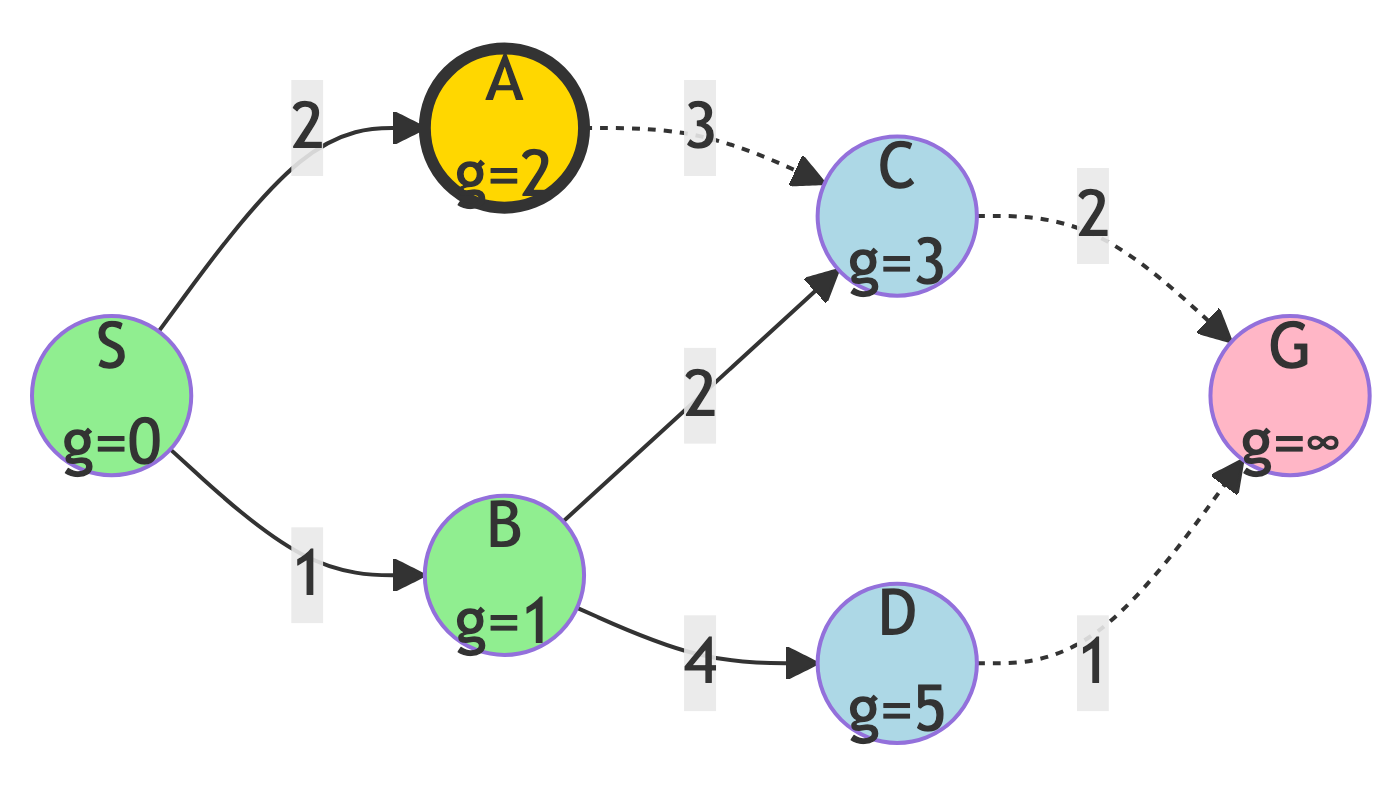
Step 2: Expand B
Action:
- B has lowest g-score (g=1)
g-score Updates:
- g(C) = 1 + 2 = 3
- g(D) = 1 + 4 = 5
New State:
- Frontier: {A (g=2), C (g=3), D (g=5)}
- Explored: {S, B}
Step 3: Expand A
Action:
- A has lowest g-score (g=2)
g-score Updates:
- g(C) = 2 + 3 = 5 (no update, 3 is better)
New State:
- Frontier: {C (g=3), D (g=5)}
- Explored: {S, B, A}
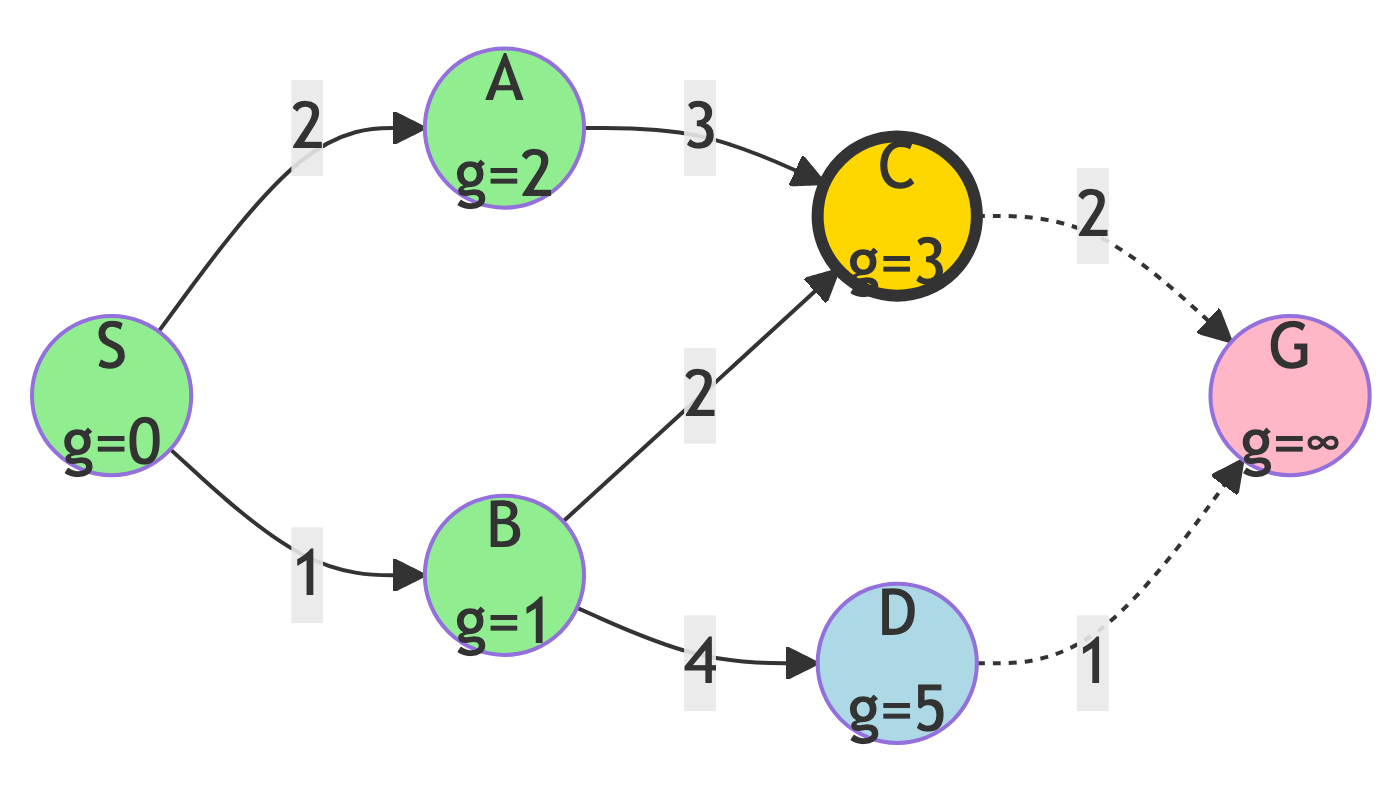
Step 4: Expand C
Action:
- C has lowest g-score (g=3)
g-score Updates:
- g(G) = 3 + 2 = 5
New State:
- Frontier: {D (g=5), G (g=5)}
- Explored: {S, B, A, C}
- Tie between D and G!
Step 5: Expand D (or G)
Action:
- Break tie arbitrarily - let’s expand D first
g-score Updates:
- g(G) = 5 + 1 = 6 (no update, 5 is better!)
New State:
- Frontier: {G (g=5)}
- Explored: {S, B, A, C, D}
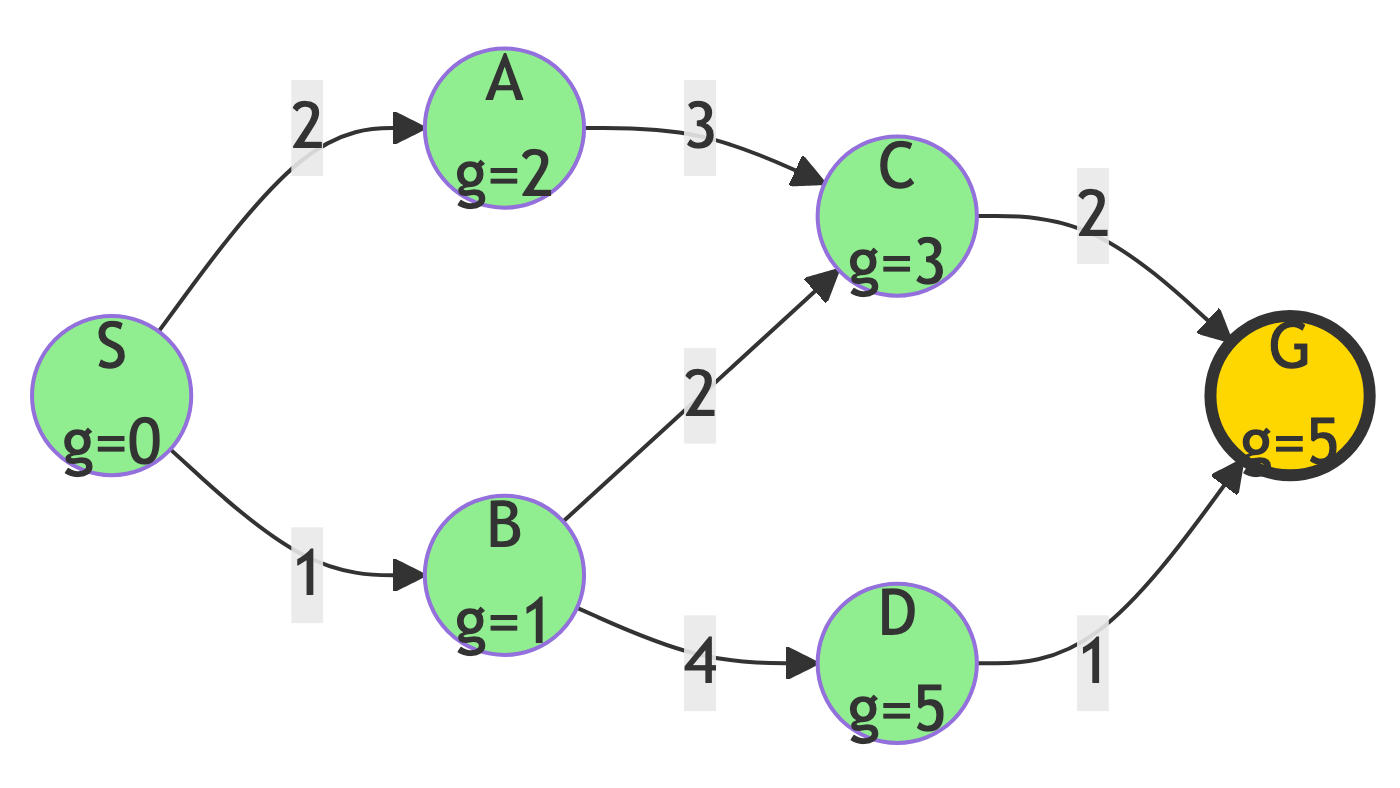
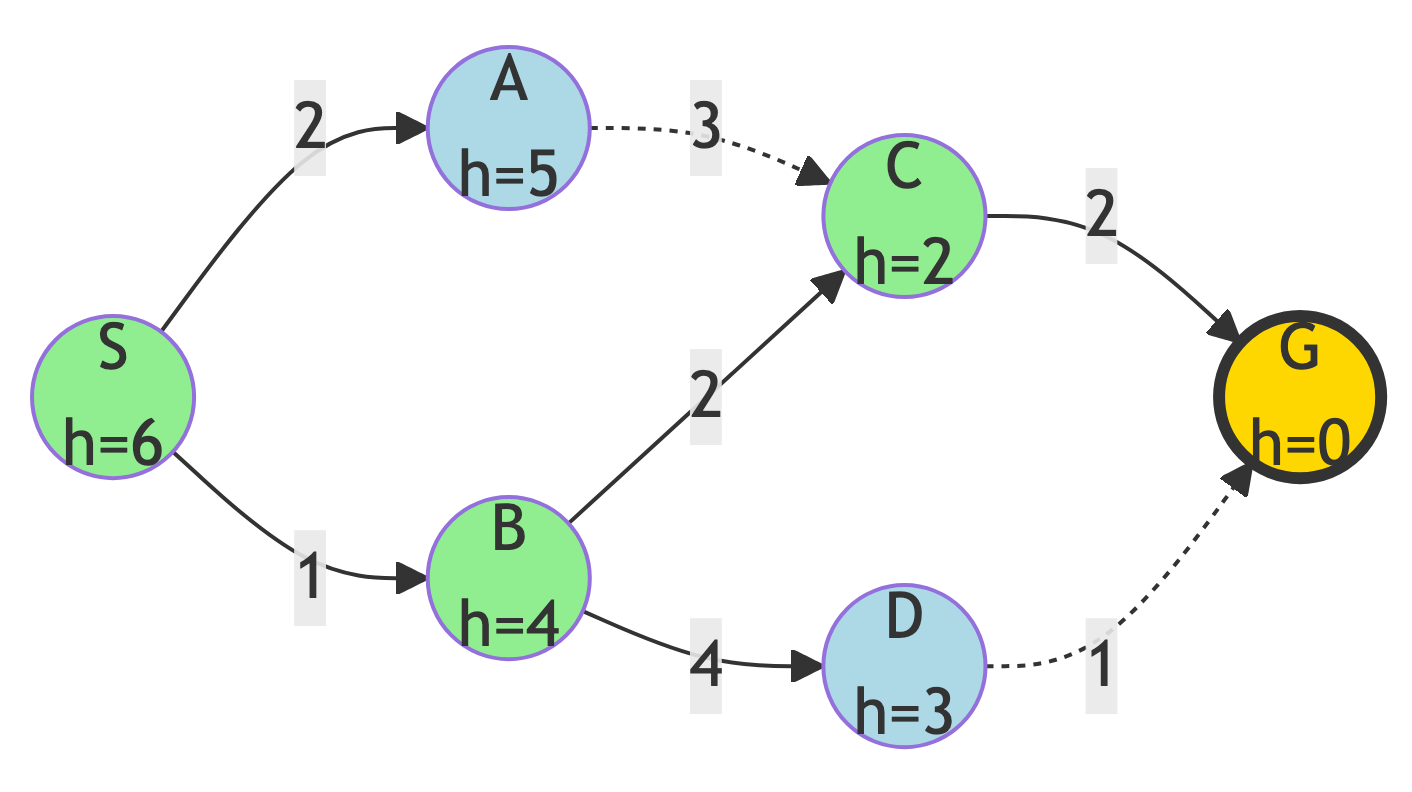
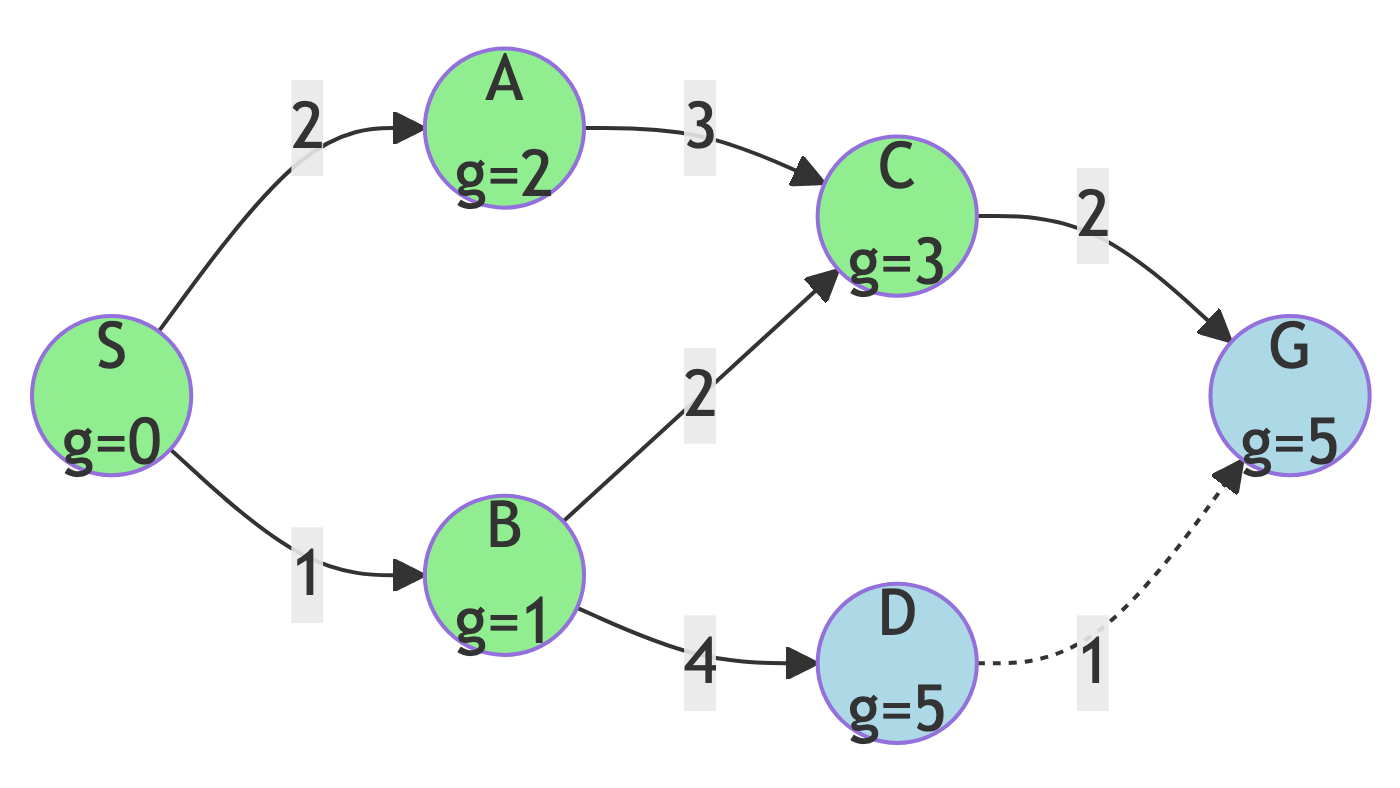
Step 6: Reach Goal
Result:
- G is expanded - goal reached!
Path Found:
- S → B → C → G
Path Cost:
1 + 2 + 2 = 5
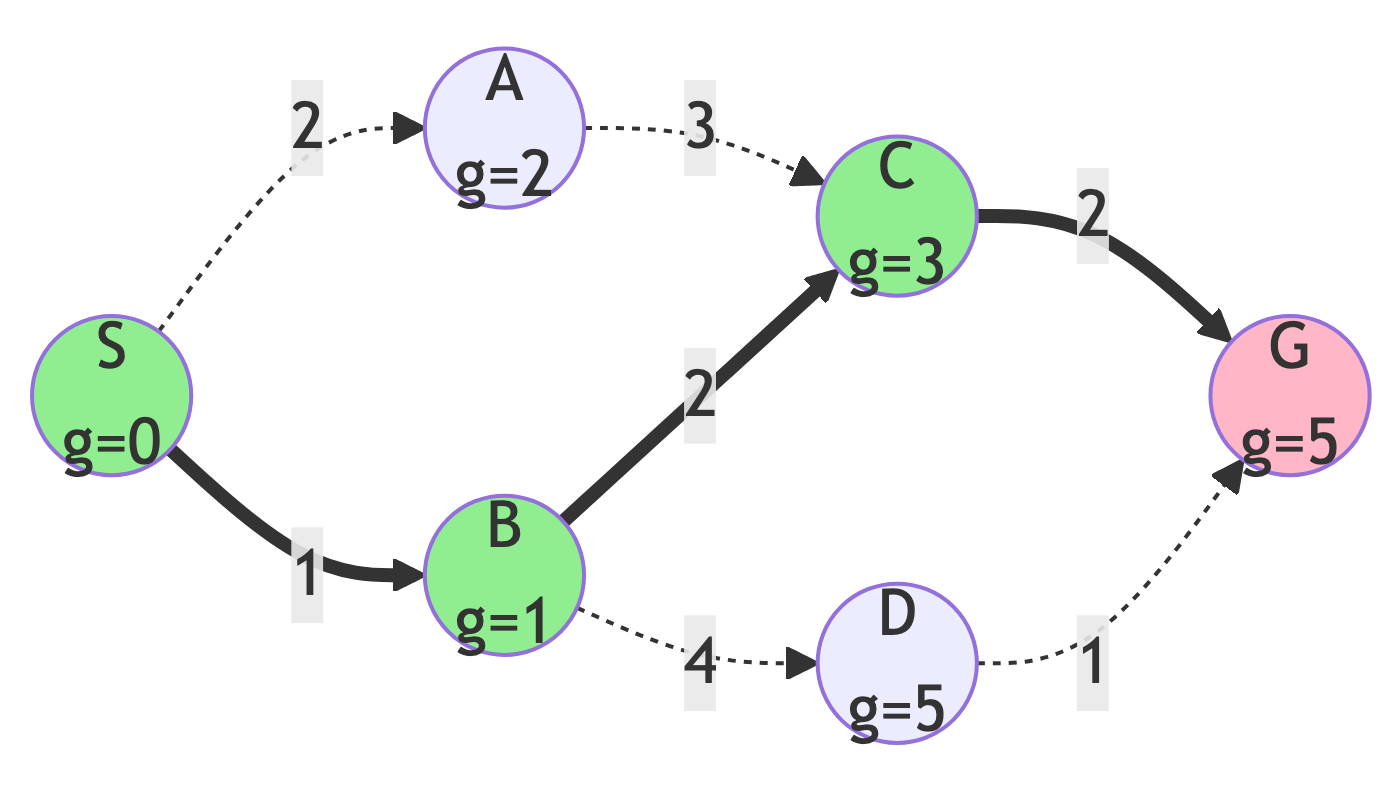
Dijkstra Results
Summary:
- Path: S → B → C → G
- Cost: 5
- Nodes Explored: 6 (S, B, A, C, D, G)
- Optimal? YES - guaranteed!
Observation:
- Dijkstra explored more nodes than Greedy BFS but found the same path. The key difference: Dijkstra guarantees this is optimal.
Why Is This Path Optimal?
Alternative Path Analysis:
S → A → C → G = 2 + 3 + 2 = 7 (worse)
S → B → D → G = 1 + 4 + 1 = 6 (worse)
S → B → C → G = 1 + 2 + 2 = 5 (best!)
Dijkstra checked all possibilities systematically and confirmed 5 is the minimum cost.
A* Search Algorithm
Algorithm Overview
Strategy:
- Combine actual cost g(n) and heuristic h(n) using evaluation function f(n) = g(n) + h(n)
Key Characteristics:
- Uses both actual cost and heuristic information
- Optimal when heuristic is admissible (never overestimates)
- More efficient than Dijkstra with good heuristics
- Best of both worlds
A* Search: The Idea
Think of it like:
- A smart explorer who considers both how far they’ve traveled AND how far they estimate they still need to go.
Analogy:
- Like planning a road trip where you consider both the miles already driven and your GPS estimate of remaining distance.
A* Pseudocode
function AStar(start, goal):
frontier = PriorityQueue()
frontier.add(start, h(start))
g_scores = {start: 0}
explored = empty set
while frontier is not empty:
current = frontier.pop() # Lowest f(n)
if current == goal:
return path
explored.add(current)
for each neighbor of current with cost:
tentative_g = g[current] + cost
if neighbor not in explored or
tentative_g < g[neighbor]:
g[neighbor] = tentative_g
f[neighbor] = g[neighbor] + h[neighbor]
frontier.add(neighbor, f[neighbor])
return failureThe f(n) Function
Evaluation Function:
- f(n) = g(n) + h(n)
Components:
- g(n) = actual cost from start to node n
- h(n) = estimated cost from node n to goal
- f(n) = estimated total cost of path through n
Intuition:
- We want to explore paths that have both low actual cost so far AND promise to reach the goal efficiently.
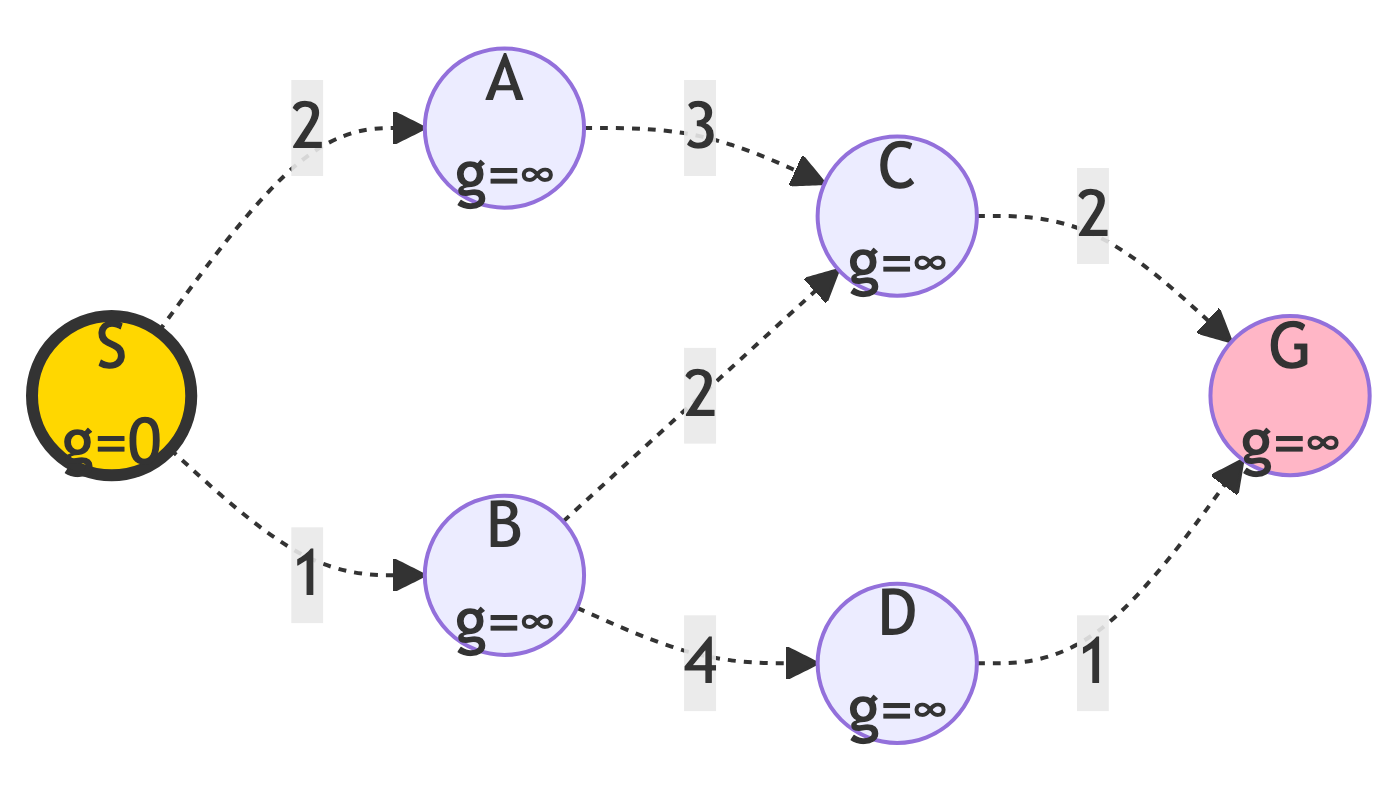
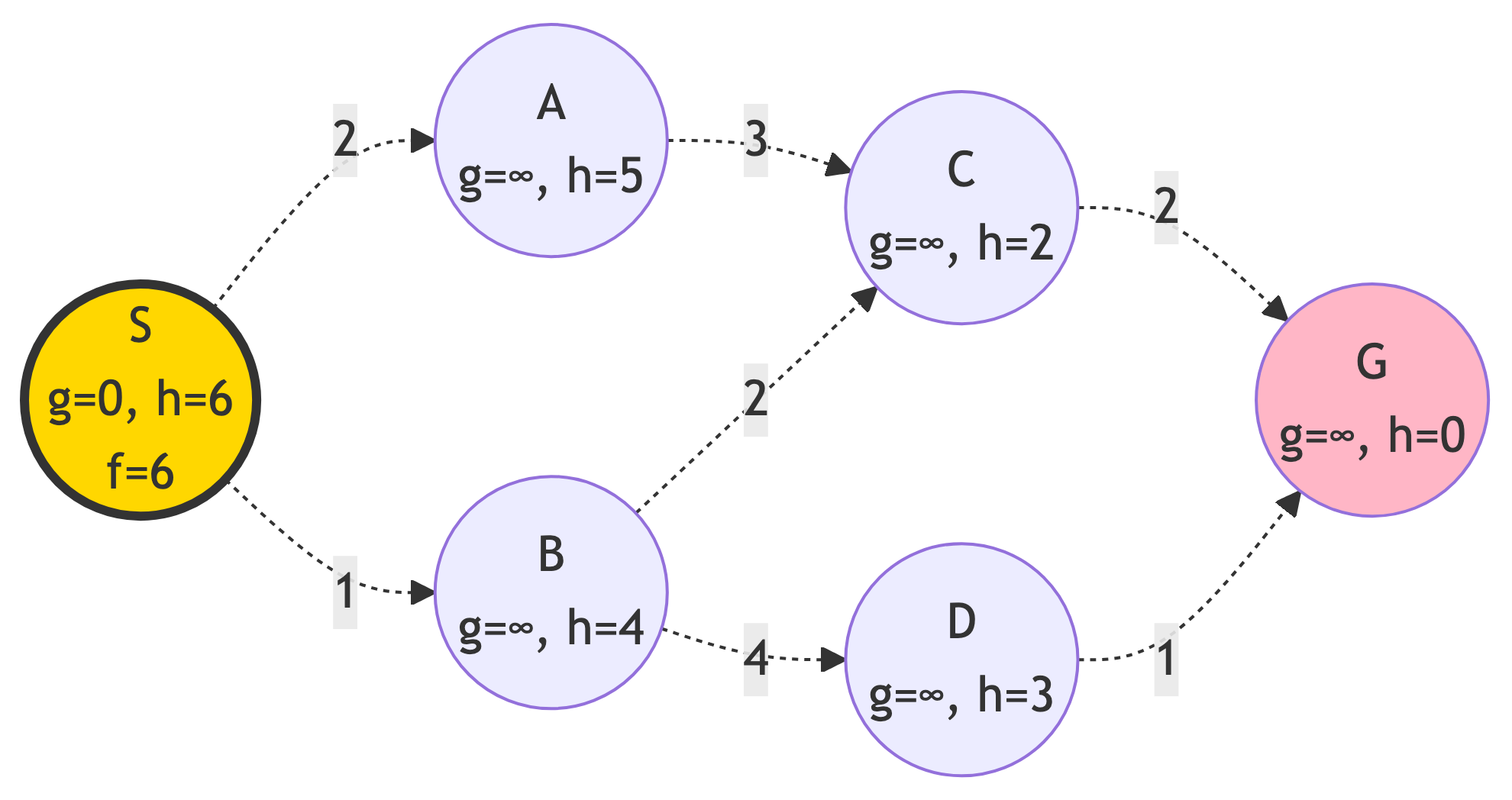
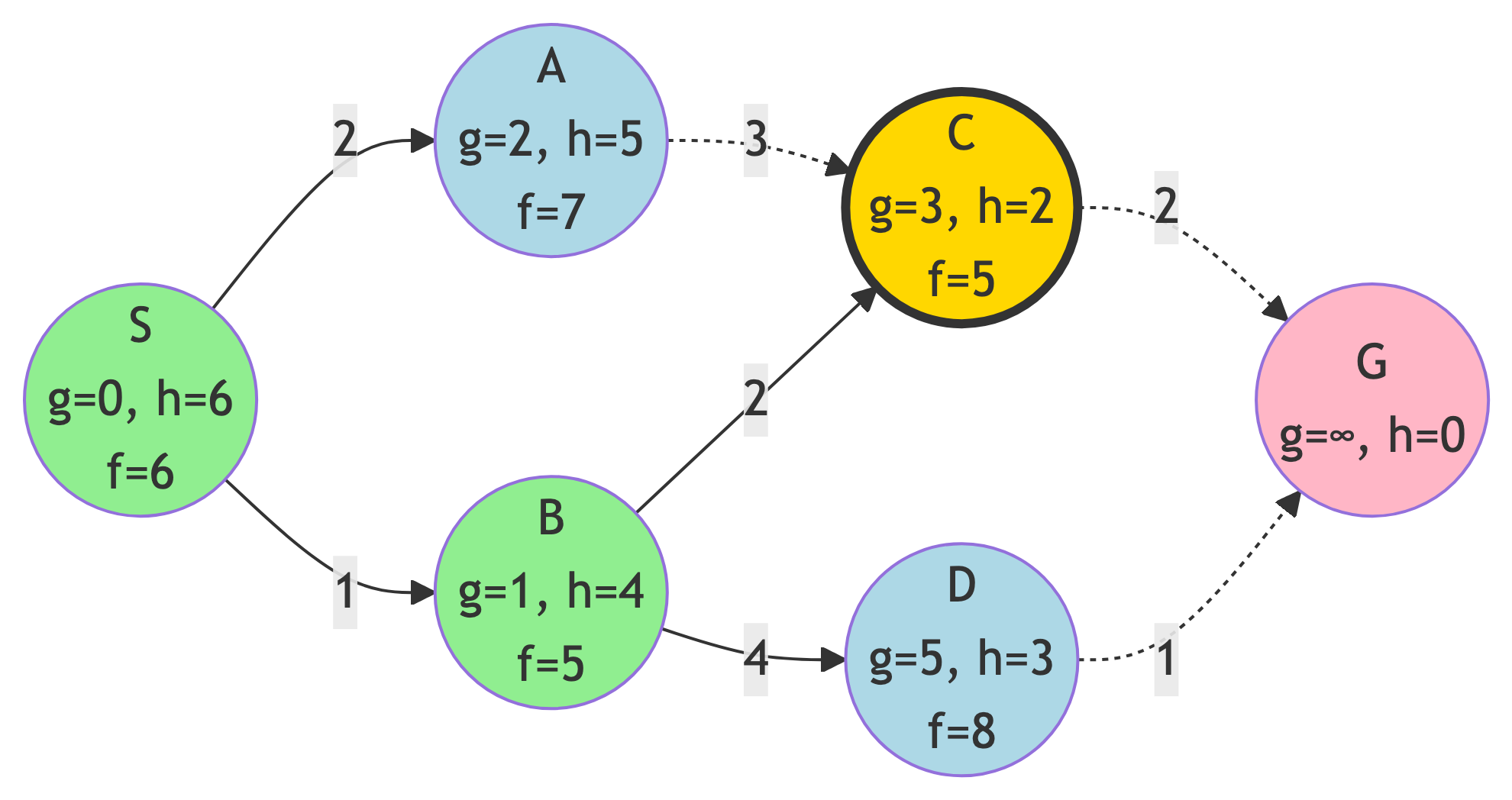
Step 0: Initialize
Starting State:
- Frontier: {S (f=0+6=6)}
- g-scores: {S: 0}
- Explored: {}
Step 1: Expand S
Action:
- Calculate f-scores for neighbors
f-score Updates:
- A: g=2, h=5, f=7
- B: g=1, h=4, f=5
New State:
- Frontier: {B (f=5), A (f=7)}
- Explored: {S}
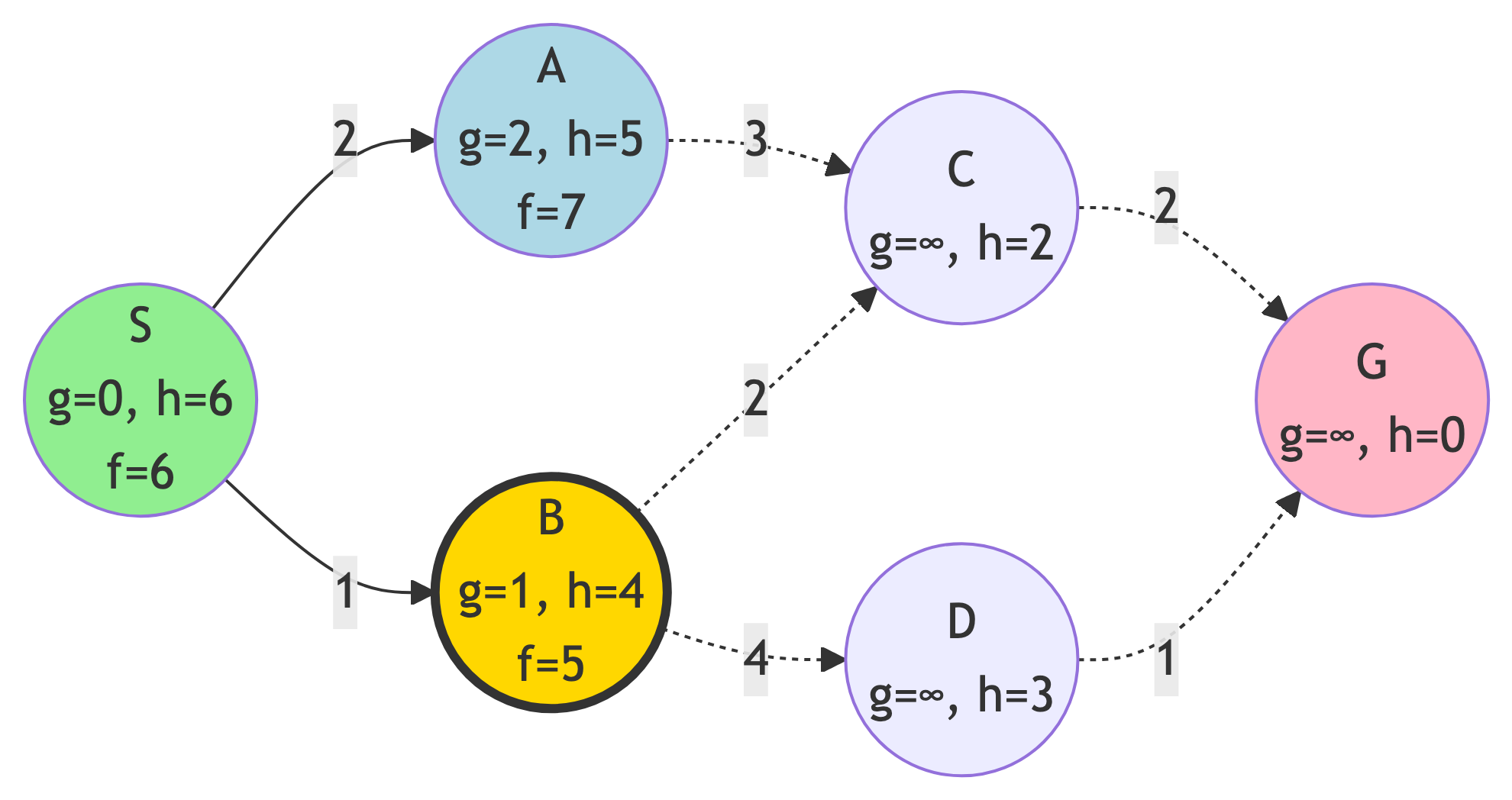
Step 2: Expand B
Action:
- B has lowest f-score (f=5)
f-score Updates:
- C: g=3, h=2, f=5
- D: g=5, h=3, f=8
New State:
- Frontier: {C (f=5), A (f=7), D (f=8)}
- Explored: {S, B}
Step 3: Expand C
Action:
- C has lowest f-score (f=5)
f-score Updates:
- G: g=5, h=0, f=5
New State:
- Frontier: {G (f=5), A (f=7), D (f=8)}
- Explored: {S, B, C}
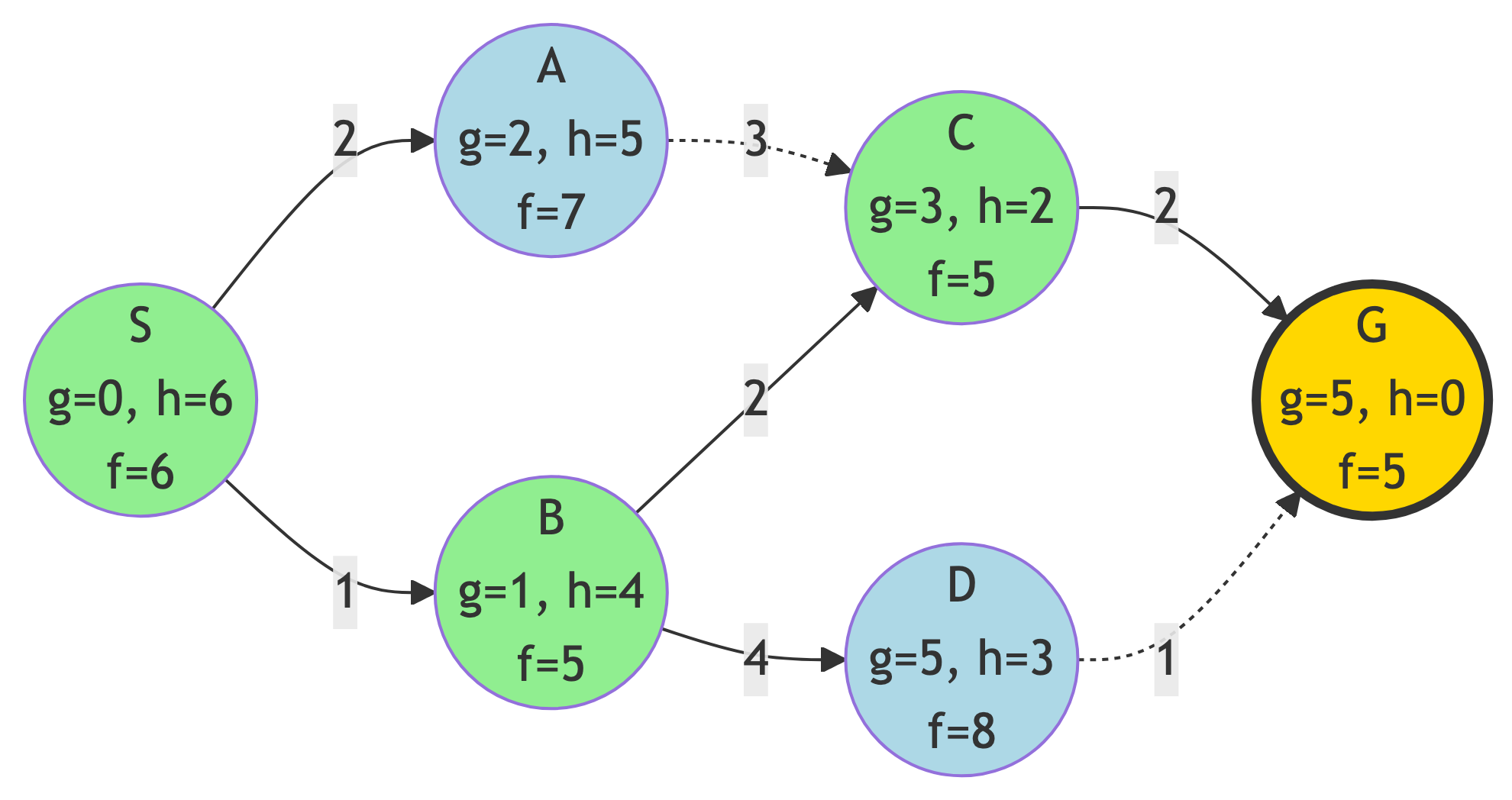
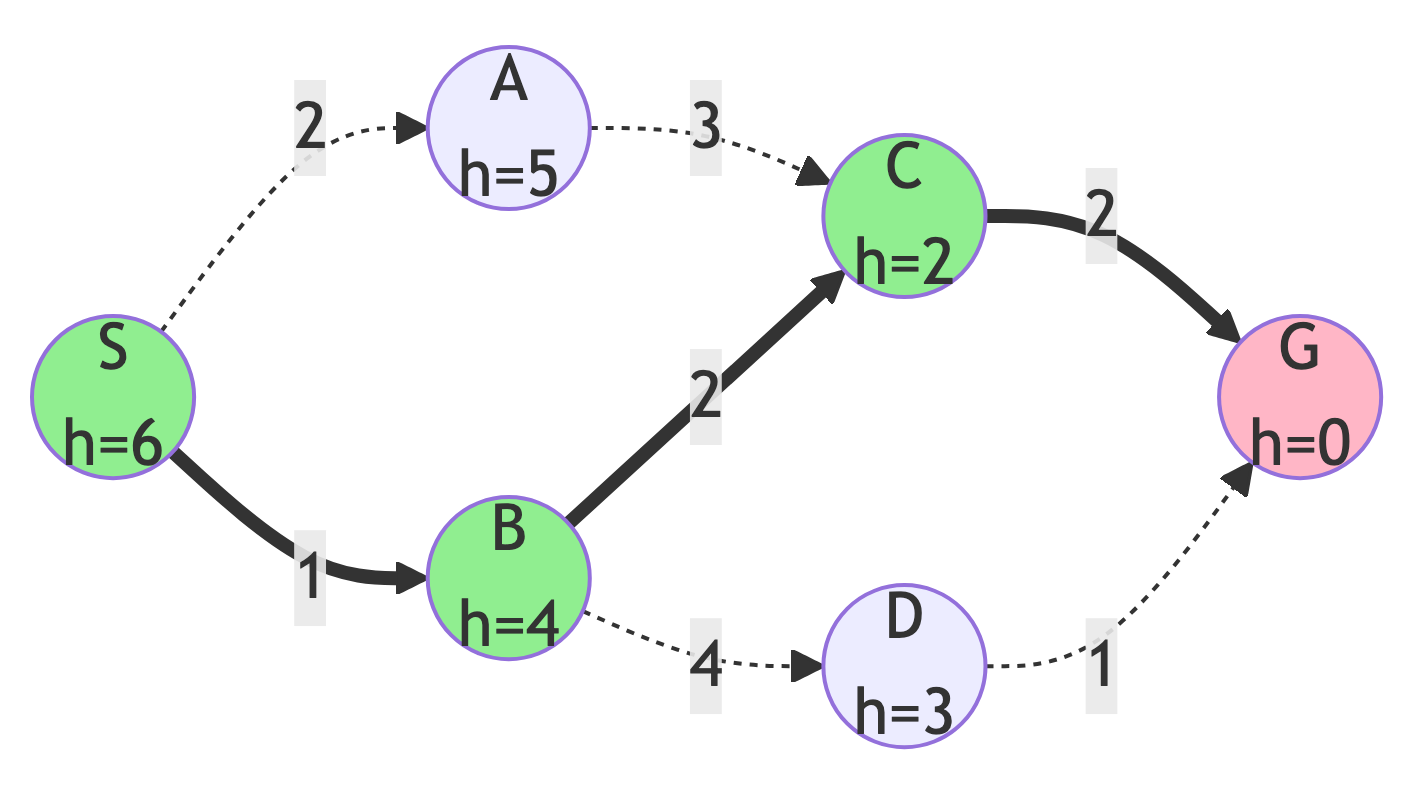
Step 4: Reach Goal
Result:
- G has lowest f-score (f=5) - goal reached!
Path Found:
- S → B → C → G
Path Cost:
- 1 + 2 + 2 = 5
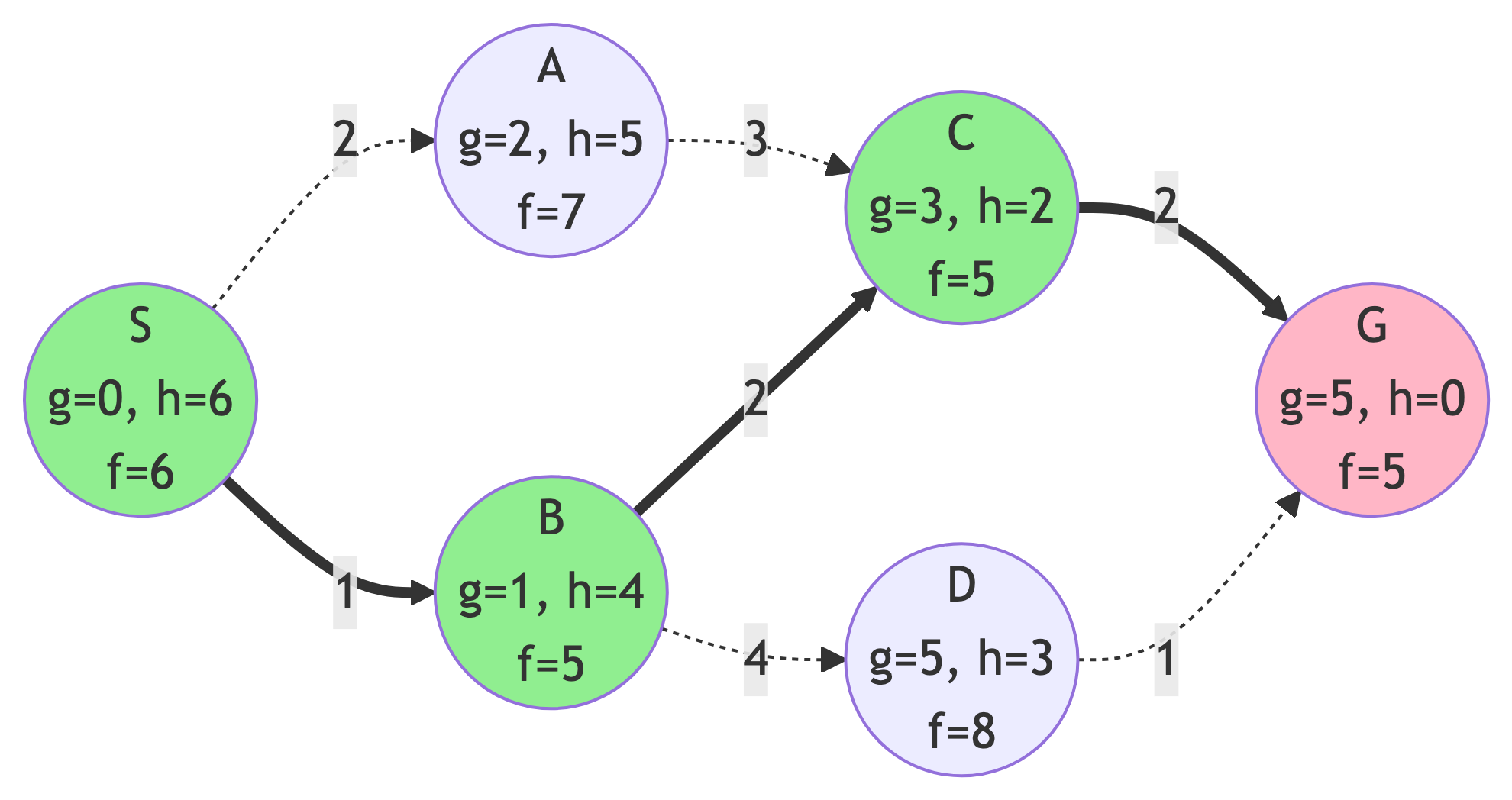
A* Results
Summary:
- Path: S → B → C → G
- Cost: 5
- Nodes Explored: 4 (S, B, C, G)
- Optimal? YES (with admissible heuristic)
Observation:
- A* explored the same number of nodes as Greedy BFS (4) but with the optimality guarantee of Dijkstra!
Why A* Was Efficient
The Power of f(n):
- A* avoided exploring A and D because their f-scores indicated they wouldn’t lead to better solutions.
Comparison:
- Node A: f=7 (higher than solution)
- Node D: f=8 (higher than solution)
- Solution path: all nodes had f≤5
This is why A* is often the best choice when a good heuristic is available.
Algorithm Comparison
Side-by-Side Results
| Algorithm | Path | Cost | Nodes Explored | Optimal? |
|---|---|---|---|---|
| Greedy BFS | S→B→C→G | 5 | 4 | Yes* |
| Dijkstra | S→B→C→G | 5 | 6 | Yes |
| A* | S→B→C→G | 5 | 4 | Yes |
*Greedy BFS happened to find the optimal path but doesn’t guarantee it
Exploration Pattern Comparison

Performance Metrics
Time Complexity:
- All three: O((V + E) log V) with priority queue
- In practice, efficiency varies with heuristic quality
Space Complexity:
- All three: O(V) for storing nodes
- A* may need more memory for f-scores
Optimality:
- Greedy BFS: No guarantee
- Dijkstra: Always optimal
- A*: Optimal with admissible heuristic
When to Use Each Algorithm
Greedy Best-First Search:
- When speed is critical and approximate solutions are acceptable
- When you have a very accurate heuristic
- Video games, real-time systems
Dijkstra’s Algorithm:
- When optimality is required and no heuristic is available
- When all edges have different costs
- Network routing, GPS without traffic data
A* Search:
- When optimality is required and good heuristics exist
- Most pathfinding applications
- GPS with traffic data, game AI, robotics
Heuristic Quality Matters
Admissible Heuristics:
- Never overestimate the actual cost (h(n) ≤ actual cost)
Good Heuristics:
- Lead A* to explore fewer nodes
- Make A* more efficient than Dijkstra
- Examples: Euclidean distance, Manhattan distance
Poor Heuristics:
- If h(n) = 0 for all nodes, A* becomes Dijkstra
- If h(n) overestimates, A* may not be optimal
- Balance accuracy and computation time
Key Takeaways
Core Concepts
Three Different Strategies:
- Greedy - Follow what looks best locally (fast, risky)
- Systematic - Check everything methodically (slow, guaranteed)
- Informed - Use knowledge to guide systematic search (efficient, guaranteed)
The Trade-off Triangle:
- Speed ↔︎ Optimality ↔︎ Information Requirements
Practical Applications
Real-World Impact:
- Google Maps uses A*-like algorithms
- Video games use optimized variants for NPC pathfinding
- Robots use these for navigation
- Network protocols use Dijkstra variants
Choosing the Right Algorithm:
- Consider your constraints and requirements before selecting an approach.